Cybot – épisode 1 – Intégration de l’Arduino Nano
La base du projet :
Apres le tour du propriétaire de Cybot du précédent article, je vais commencer la conception de la platine qui va permettre d’interfacer l’Arduino aux cartes de la première couche.
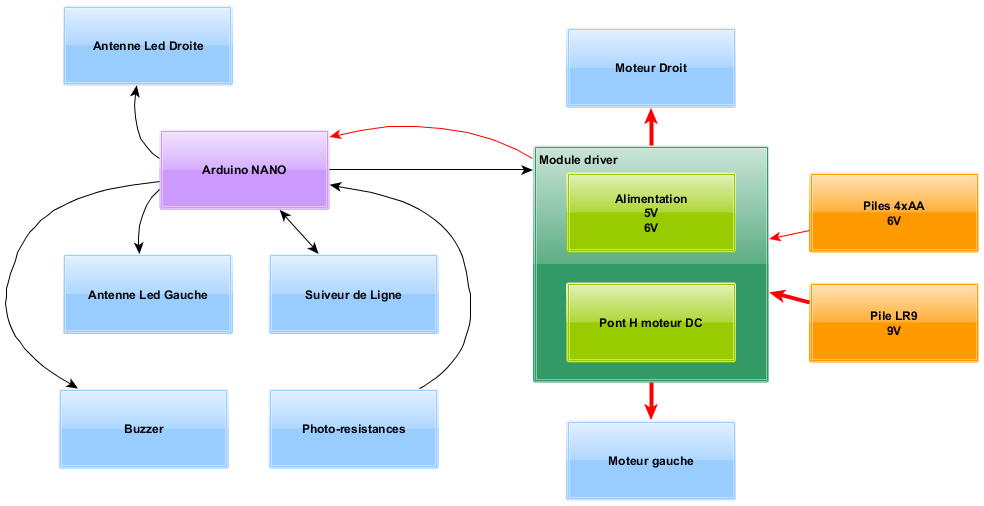
Pour rappel le microcontrôleur est relié à la carte IO Light qui est elle même reliée à la carte Driver de commande des moteurs. J’ai choisis de remplacer en fait complètement le microcontrôleur et la carte IO Light. Cela permet de connecter directement les différents éléments aux entrées de l’Arduino et surtout de pouvoir gérer de façons indépendantes les photorésistances et les leds des antennes (oui j’y tenais beaucoup). L’autre raison est que sinon je n’avais pas la place d’intégrer l’Arduino Nano.
La conception :
Il me faut conserver les 2 connecteurs principaux, soit J3 (7 broches, barrette coudée mâle) qui est la connexion à la carte Driver et J2 (6 broches, barrette droite femelle) qui est la liaison I2C avec les autres modules microcontrôleurs.
Il faudra donc ajouter des connecteurs 2 broches (jst pH) pour :
- buzzer.
- led droite.
- led gauche.
- photorésistance droite.
- photorésistance gauche.
Un connecteur 4 broches (jst pH) pour la carte suiveur de ligne.
Et aussi d’autres connecteurs (barrette droite femelle) afin de pouvoir utiliser par la suite les sorties non utilisées de l’Arduino et son alimentation.
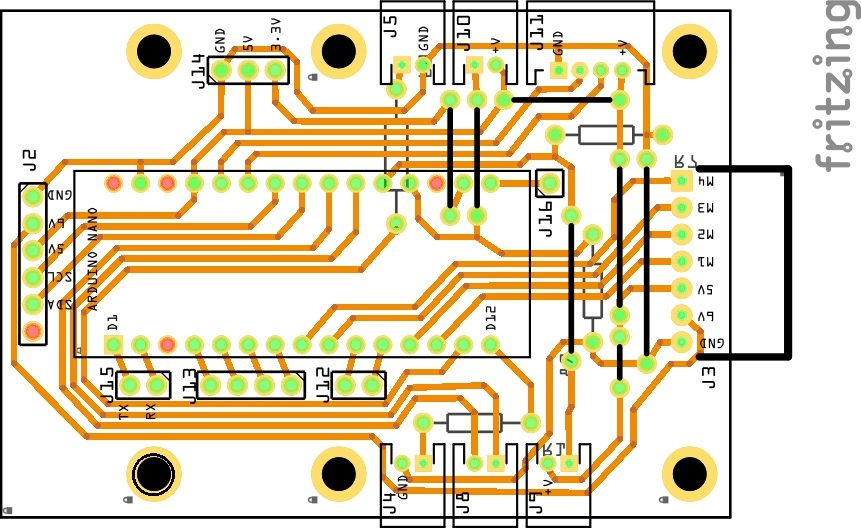
Voici le schémas de l’ensemble dessiné sous Fritzing :
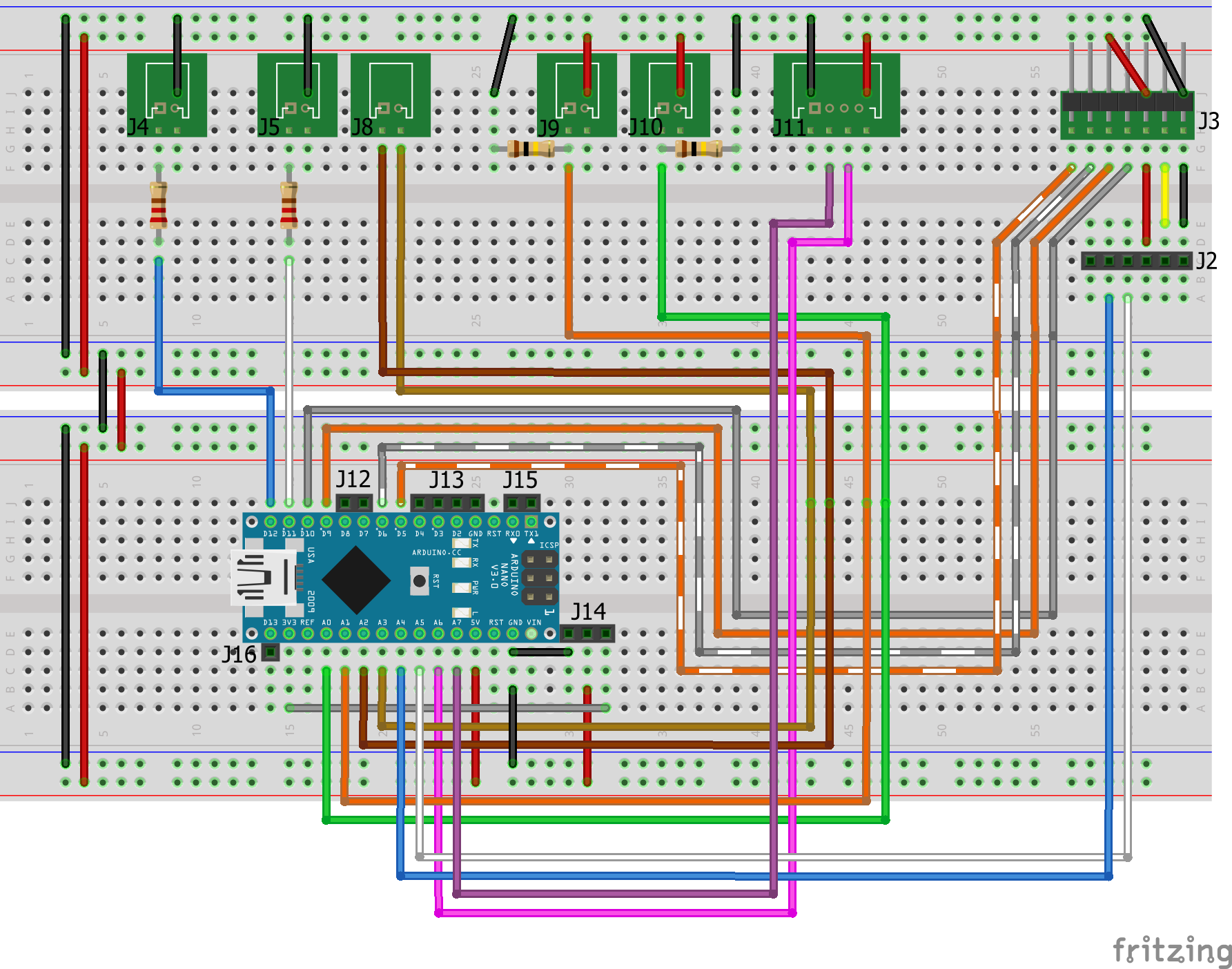
breadboard
Liste des composants :
2 x résistance 220Ω 1/4w (LED)
2 x résistance 100kΩ 1/4w (LDR)
connecteur Arduino nano : 2 x barrette femelle droite 15 pin
J2 : connecteur i2C – barrette droite femelle 6 pin
| Pin | Arduino |
|---|---|
| 1 | GND |
| 2 | +6V |
| 3 | +5V |
| 4 | A5 |
| 5 | A4 |
| 6 | nc |
J3 : carte driver – barrette coudée 90° mâle 7 pin
| Pin | Arduino |
|---|---|
| 1 | D5 |
| 2 | D6 |
| 3 | D9 |
| 4 | D10 |
| 5 | +5V |
| 6 | +6V |
| 7 | GND |
J4 : connecteur LED gauche – JST PH 2 pin male
| Pin | Arduino |
|---|---|
| 1 | D12 |
| 2 | GND |
J5 : connecteur LED droit – JST PH 2 pin male
| Pin | Arduino |
|---|---|
| 1 | D11 |
| 2 | GND |
J8 : connecteur BUZZER – JST PH 2 pin male
| Pin | Arduino |
|---|---|
| 1 | A2 |
| 2 | A3 |
J9 : connecteur LDR gauche- JST PH 2 pin male
| Pin | Arduino |
|---|---|
| 1 | A1 |
| 2 | +5V |
J10 : connecteur LDR gauche – JST PH 2 pin male
| Pin | Arduino |
|---|---|
| 1 | A0 |
| 2 | +5V |
J11 : connecteur LINE FOLLOW – JST PH 4 pin male
| Pin | Arduino |
|---|---|
| 1 | GND |
| 2 | A7 |
| 3 | A6 |
| 4 | +5V |
J12 : report Arduino 1 – barette droite femelle 2 pin
| Pin | Arduino |
|---|---|
| 1 | D8 |
| 2 | D7 |
J13 : report Arduino 2 – barette droite femelle 4 pin
| Pin | Arduino |
|---|---|
| 1 | D4 |
| 2 | D3 |
| 3 | D2 |
| 4 | GND |
J14 : report Arduino alimentation – barette droite femelle 3 pin
| Pin | Arduino |
|---|---|
| 1 | GND |
| 2 | +5V |
| 3 | +3.3V |
J15 : report Arduino 3 – barette droite femelle 2 pin
| Pin | Arduino |
|---|---|
| 1 | RX |
| 2 | TX |
J16 : report Arduino 4 – barette droite femelle 1 pin
| Pin | Arduino |
|---|---|
| 1 | D13 |
Circuit imprimé :
Schémas :
Le circuit étant un prototype unitaire, j’ai donc choisis une réalisation simple face. Cela nécessite alors quelques jumpers afin d’interconnecter les différentes parties. Je fournis plus bas les fichiers correspondants, ainsi que ceux pour une réalisation double face. Les entrées non utilisées ont été reportées sur des connecteurs afin de pouvoir faire évoluer le montage dans le futur avec d’autres capteurs.
schémas
circuit simple face : cybot_board_simple_v3_b2_etch_copper_bottom
circuit simple face avec plan de masse : cybot_board_simple_v3_b2_pwm_etch_copper_bottom
circuit double face : cybot_board_double_v3_b2_etch_copper_bottom cybot_board_double_v3_b2_etch_copper_top
circuit double face avec plan de masse : cybot_board_double_v3_b2_pwm_etch_copper_bottom cybot_board_double_v3_b2_pwm_etch_copper_top
Réalisation du circuit :
!! ATTENTION !! la réalisation d’un circuit imprimé nécessite l’utilisation de produits chimiques dangereux. Il faut donc se protéger avec des gants, lunettes et masque de protection.
Pour le réaliser j’ai choisis la méthode de transfert à froid du typon sur la plaque cuivrée, voir mon article sur comment utiliser cette méthode.
Montage du circuit :
Il n’y a pas de précautions spéciales à prendre. Les pads seront percés à 0.8mm et ensuite les trous de fixation à 3.5mm. Certains jumpers sont positionnés sur la face inférieure.
Il faut faire néanmoins attention à la barrette J3, coudé à 90°, de connexion à la carte moteur dont le support plastique doit être monté sur les pattes longues et non pas sur le coté qui doit être soudé (montage par défaut des barrettes), ce que je n’ai pas fait la première fois sur mon proto. Dans ce cas il y a un décalage de hauteur des circuits.
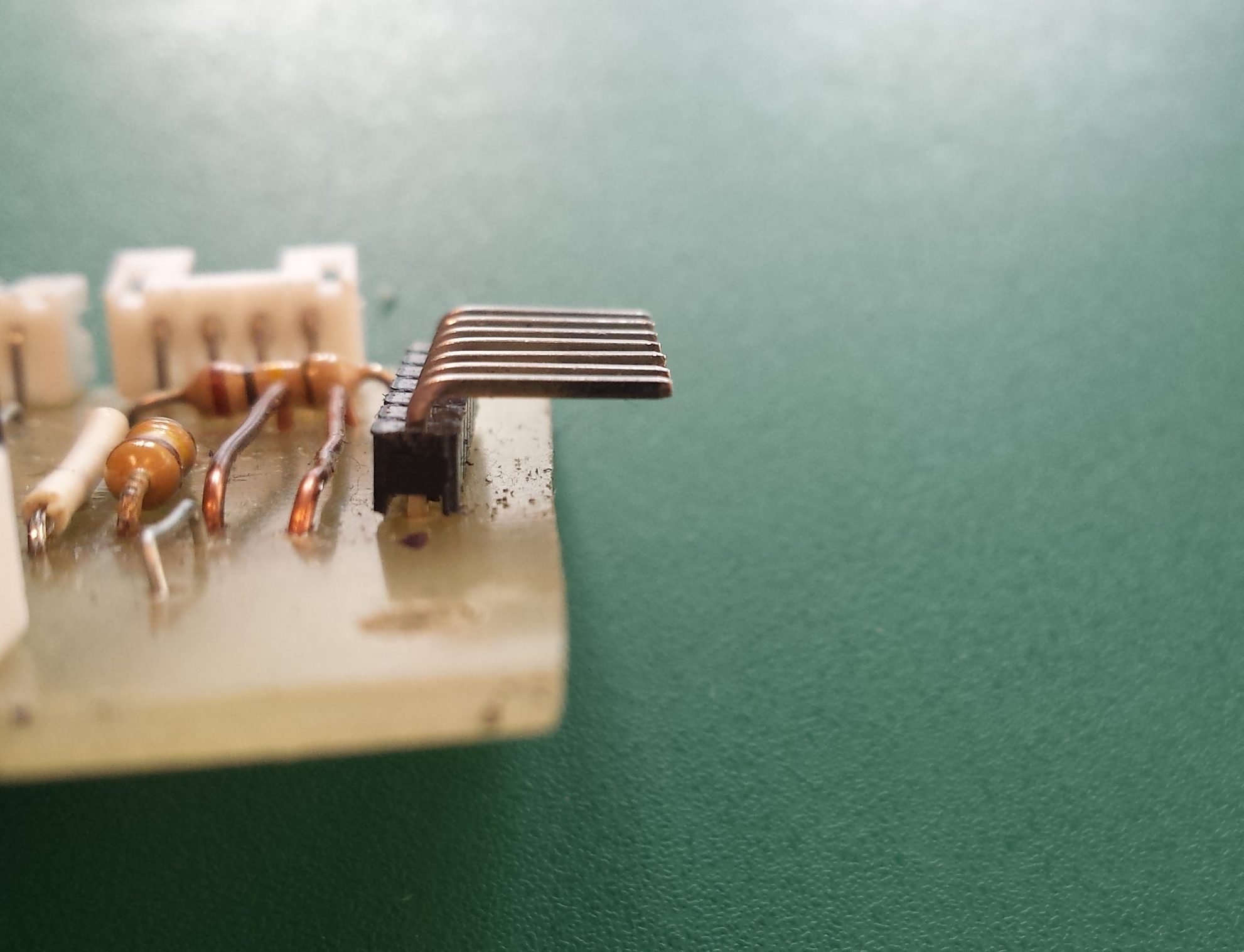
à ne pas faire !
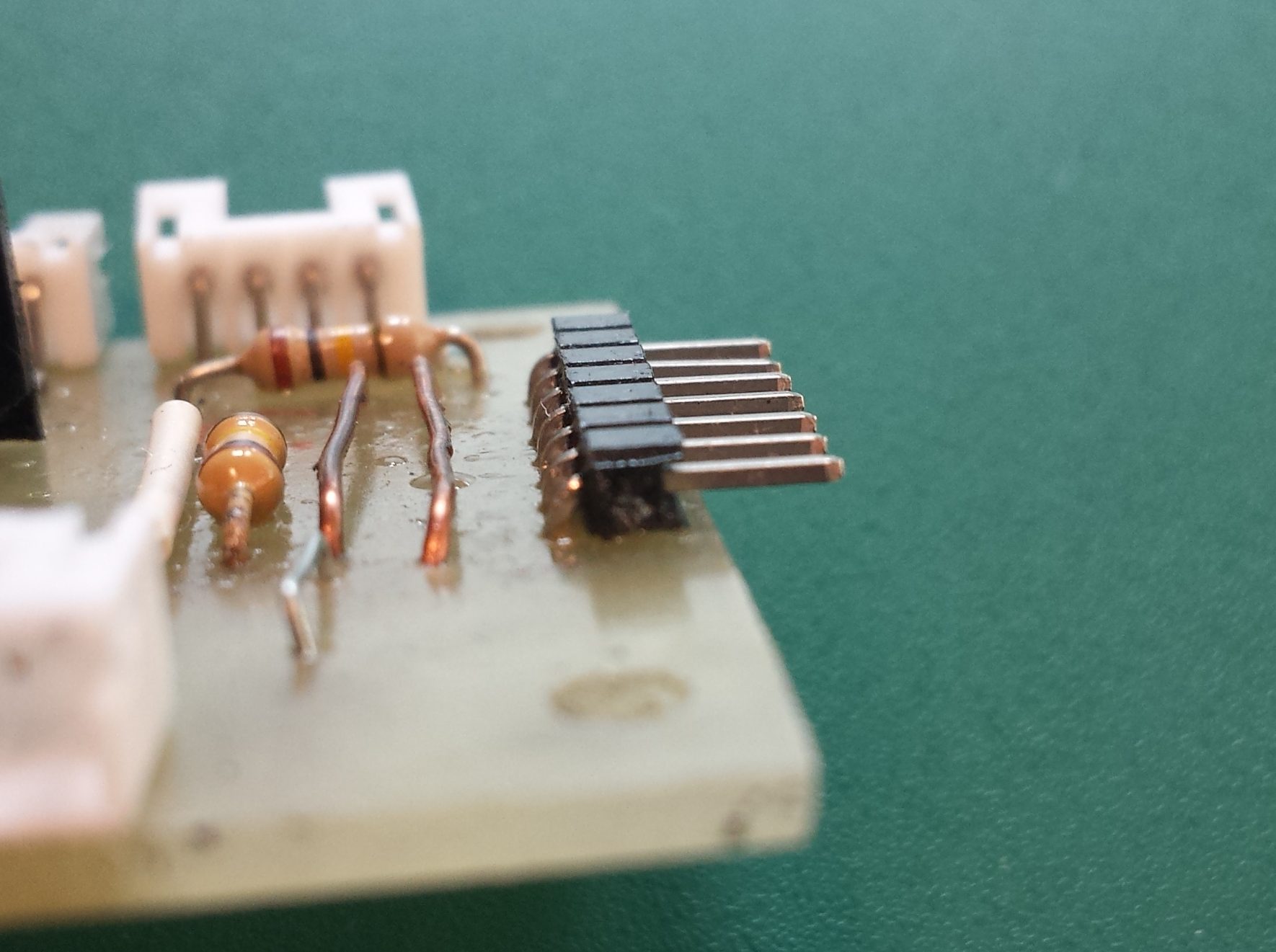
positionnement correct
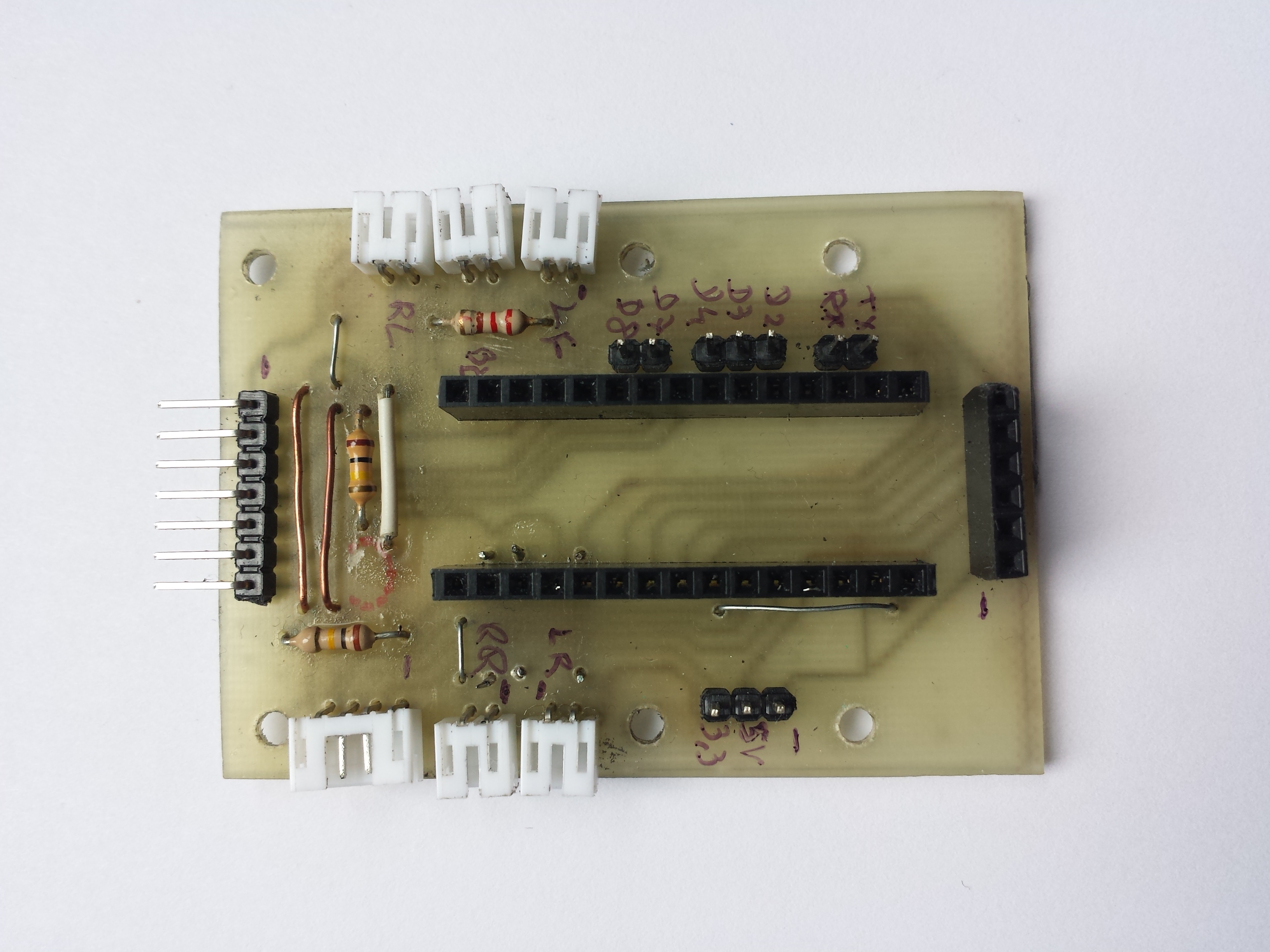
circuit terminé (c’est la version v1 avec le connecteur mal positionné)
Test du circuit :
Il faut vérifier par des tests de continuité en particulier qu’il n’y a pas de pont entre les pistes et que les différents connecteurs sont bien liés aux pins de l’arduino après soudure.
Montage dans Cybot :
Il faut retirer de Cybot toutes les cartes présentes à l’exception de la carte driver qui prend en charge l’alimentation et le pilotage des moteurs.
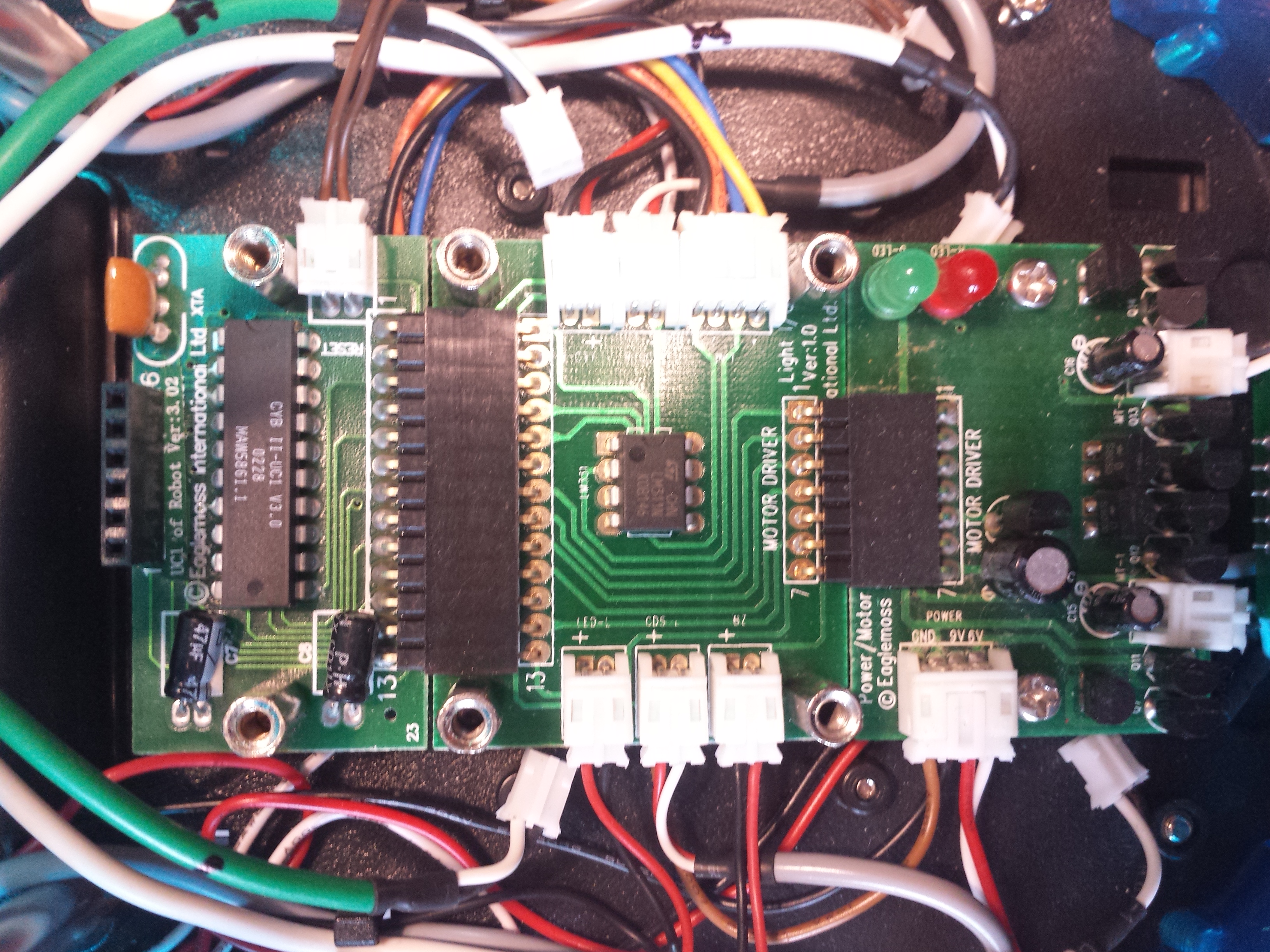
intérieur d’origine du Cybot
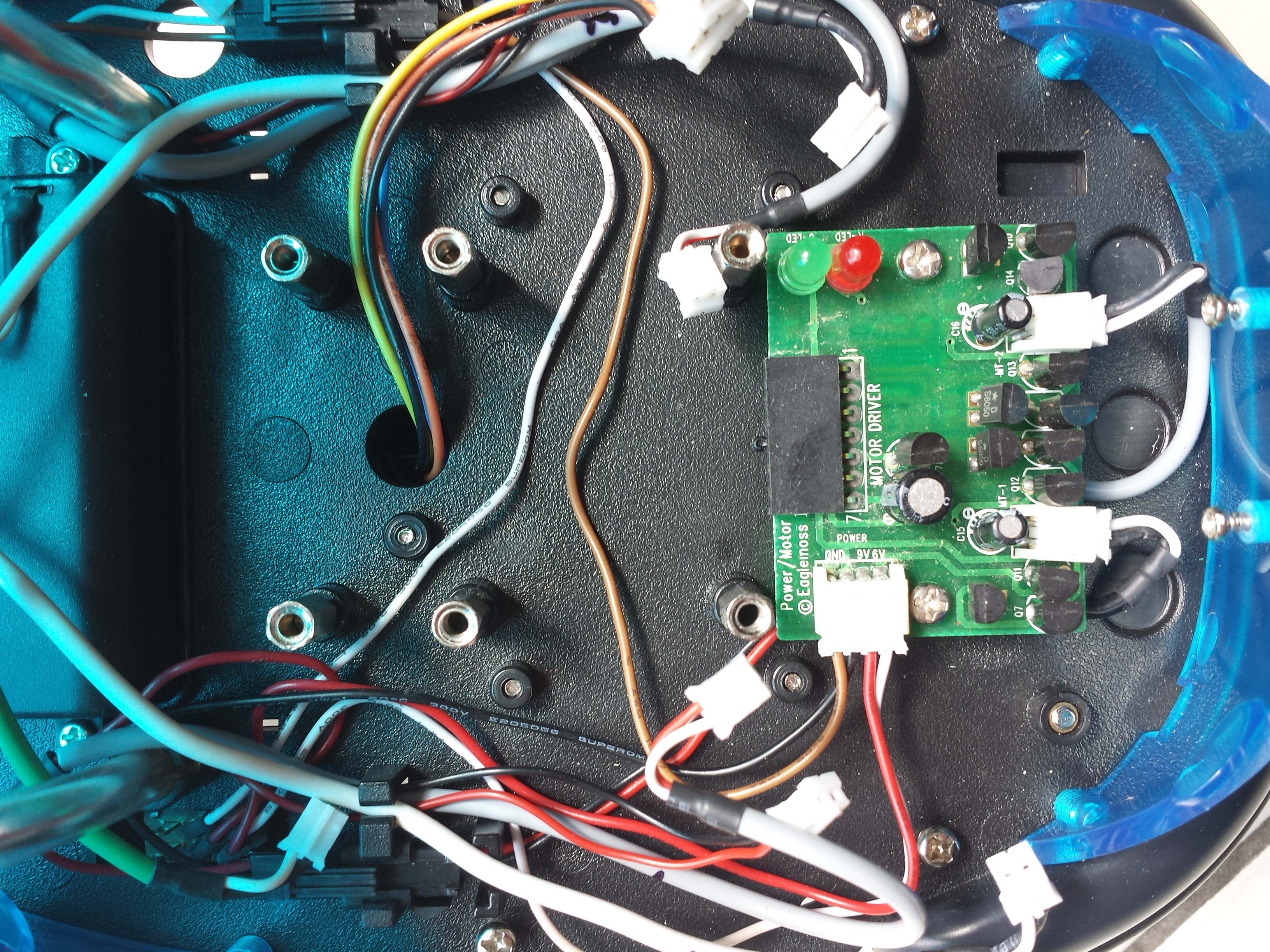
après démontage des cartes inutiles
Puis mettre en place notre nouvelle carte.
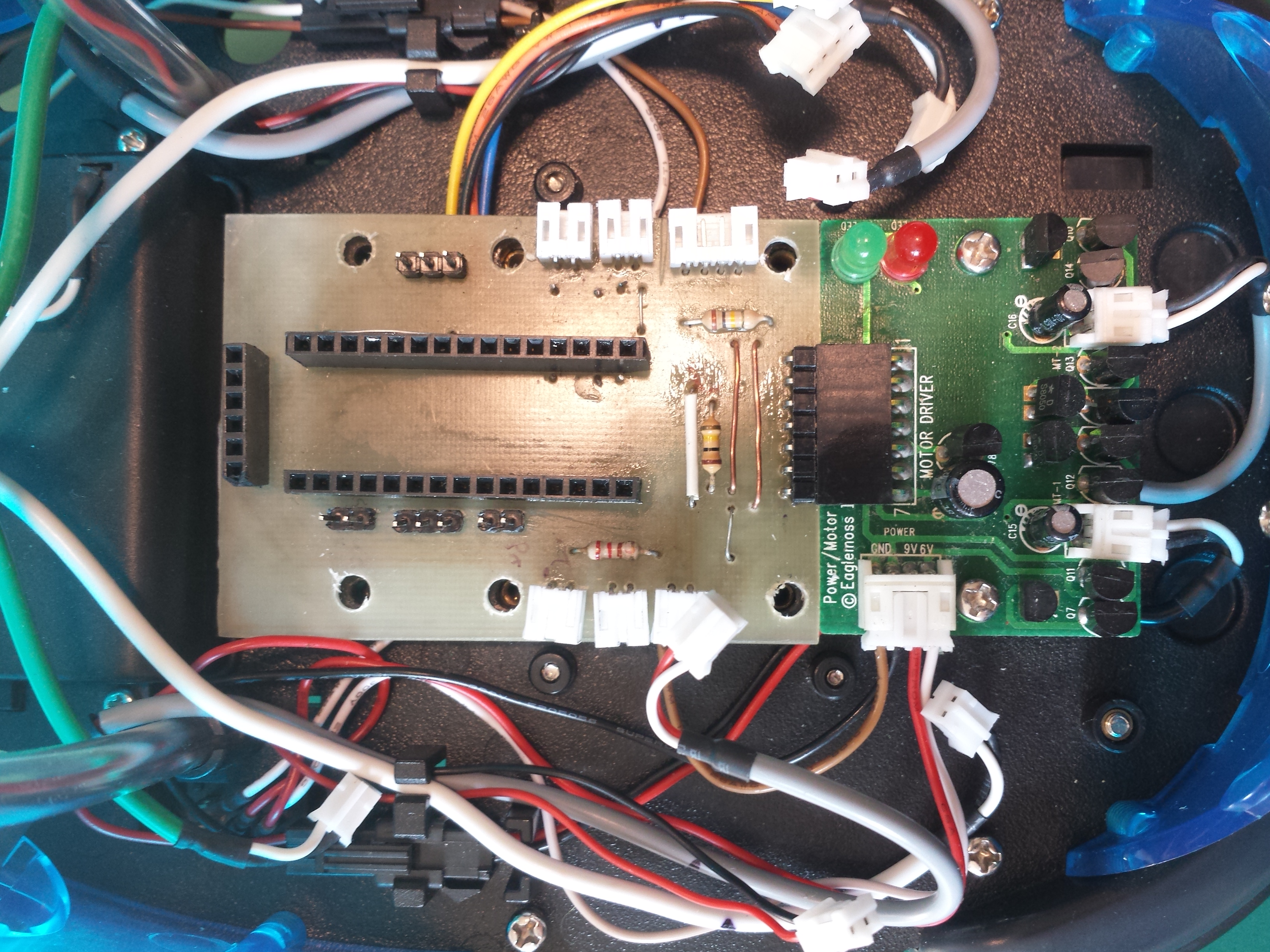
installation de la carte support
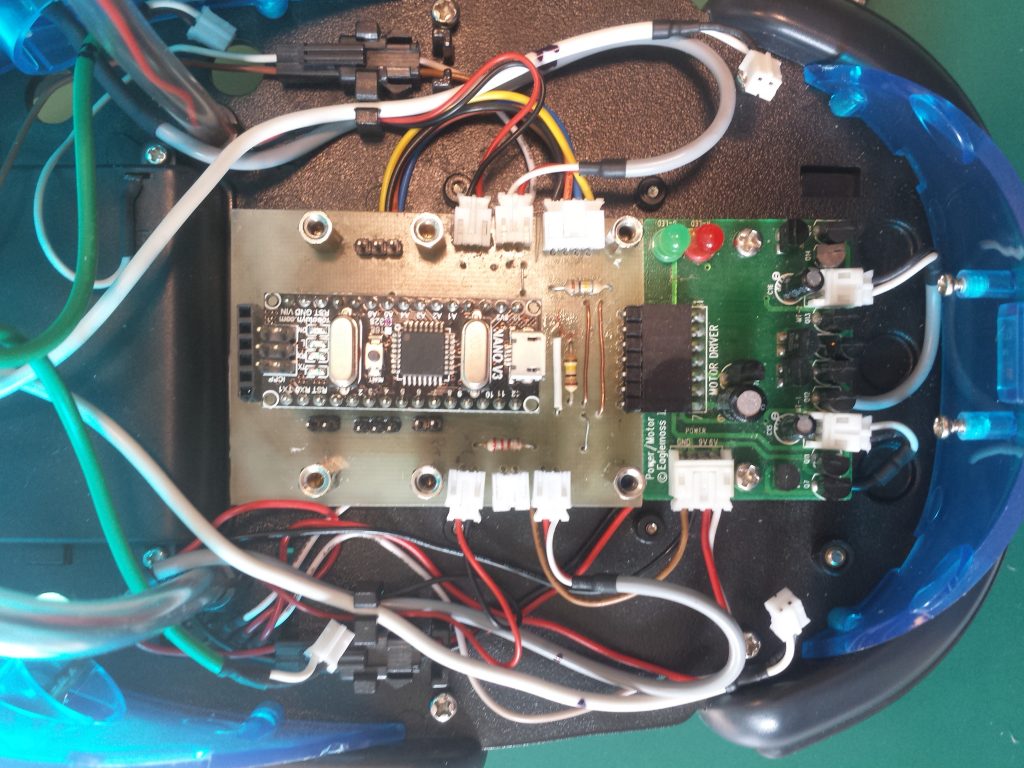
Enfin installer l’Arduino Nano et effectuer les branchements.
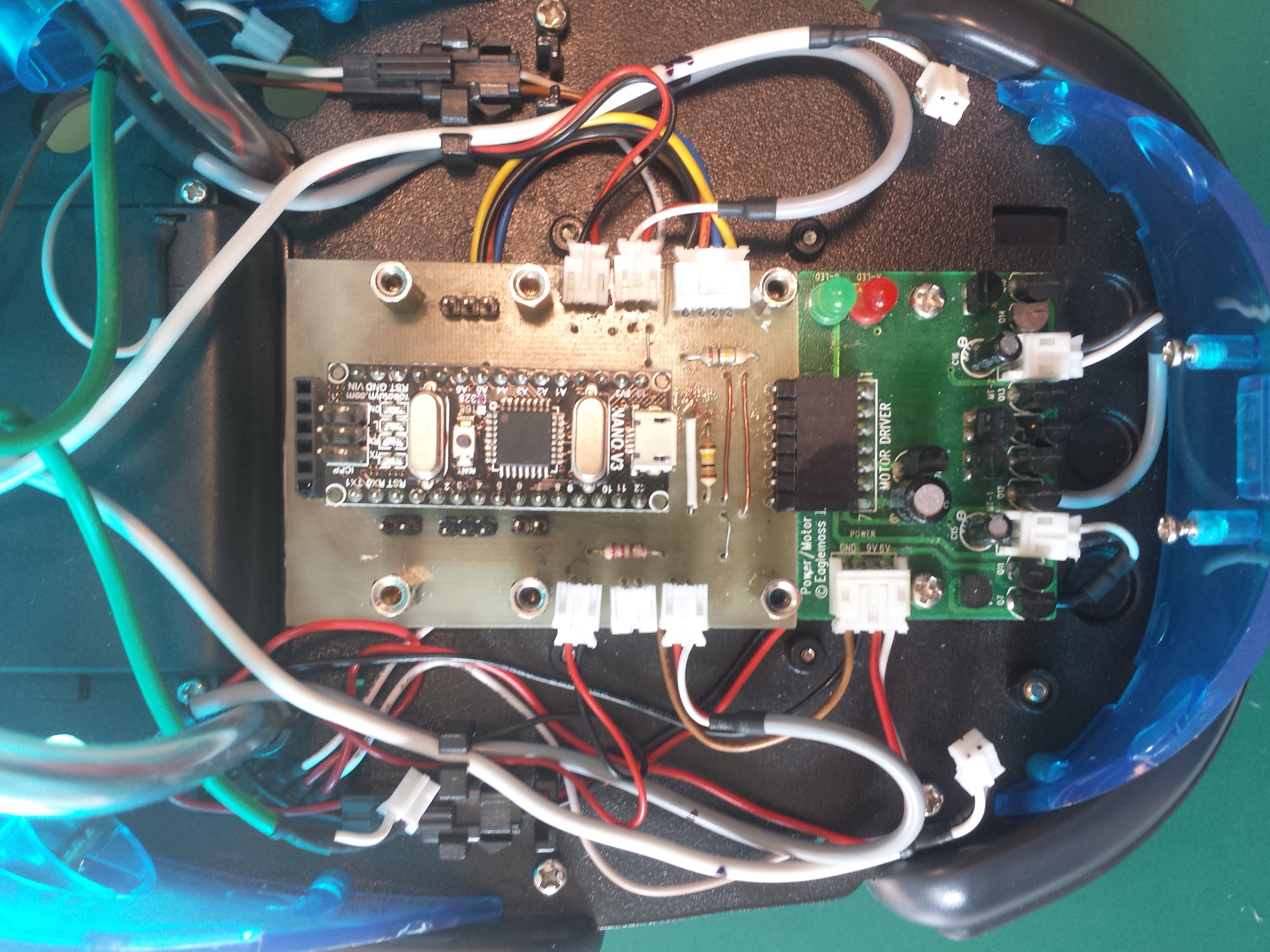
montage complet
Conclusion :
Ce prototype m’a permis de trouver les erreurs de conception et de positionnement du circuit. Les fichier fournis en téléchargement les prennent en compte, ce qui n’est pas le cas de mon proto en V1 ! Cette carte ne m’as presque rien coûtée (2€) si ce n’est les connecteur JST mais j’aurais très bien pu faire de la récup aussi. Dans le prochain article je présenterai la partie programmation de l’Arduino avec les premiers tests et si des évolutions sont nécessaires je mettrais les informations à jour dans cet article.
Super projet.
Je viens de ressortir mon cybot du grenier.